Muu vastaus on hyvä ilmoittamaan, mihin järjestelmä on tarkoitettu ja mitä se saavuttaa yleisesti, mutta kumpikaan ei selitä sen toimintaa. Vaikka tämä saattaa olla joillekin intuitiivista, se ei todennäköisesti ole ilmeistä kaikille.
Selitys annetaan Wikipedia Conical Scanning -sivulla, jonka Keity McClary lainasi - tiivistän sen täällä.
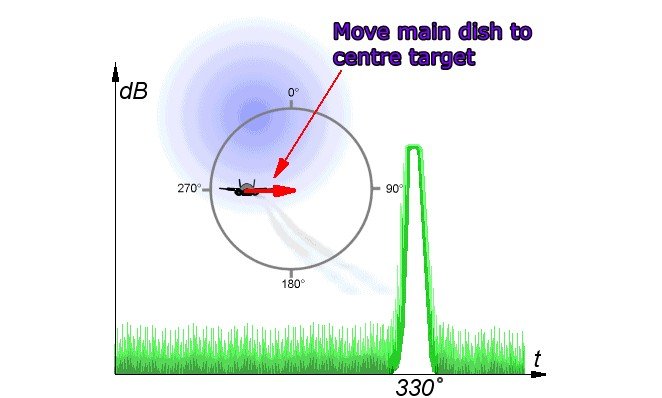
Tässä Grant Trebbinin lähettämässä GIF-kuvassa kohde on poissa akselilta ja pyörivä "peili" lakaisee pääruoan tarkennuspisteen vastaanotetun signaalin yli maksimaalisesti tietyssä sen pyörimisen kohdassa. Pyörivän peilin kiertokulma signaalin maksimissa antaa suoran osoituksen kohteen poikkeavasta suunnasta. Servo-mekanismit liikuttavat sitten pääruokaa keskittämään vastaanotettu signaali siten, että signaali on jatkuvassa maksimissa.
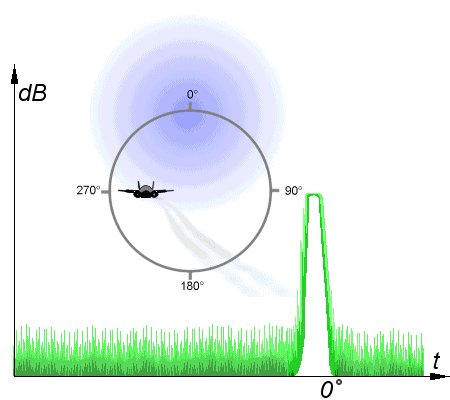
Skannatun kuvan leveys on tyypillisesti noin 2 kaaren astetta ja edellisen prosessin mahdollistama virheenkorjausmekanismi sallii kohdistuksen tyypillisesti 0,1 kaaren asteeseen.
 On mielenkiintoista, että Facebook käyttää tätä tekniikkaa, koska se on hyvin vanha tekniikka, joka on useimmissa tapauksissa korvattu elektronisilla säteenohjaus- ja lohkonmuodostusjärjestelmillä.
On mielenkiintoista, että Facebook käyttää tätä tekniikkaa, koska se on hyvin vanha tekniikka, joka on useimmissa tapauksissa korvattu elektronisilla säteenohjaus- ja lohkonmuodostusjärjestelmillä.
GERMAN WW2 Wurzburg -tutka käytti kartiomaista skannausta tarkkuuden parantamiseksi. Järjestelmää koskeva työ aloitettiin vuonna 1935 viranomaisten vähäisellä mielenkiinnolla. Alkuperäinen etäisyystarkkuus vuonna 1936, 50 metriä 5 kilometrillä, ei ollut tarkoitukseen sopiva (aseen asettaminen), mutta vuoteen 1938 mennessä se oli parantunut 25 metriin 29 kilometrillä. Aksiaalinen suuntaus tehtiin aluksi signaalin voimakkuuden maksimoinnilla ja manuaalisella lautasen paikannuksella (!) Valonheittimillä ja infrapunasäteillä (!!), sitten 2-lohkoisella järjestelmällä käyttäjän kanssa "oskilloskooppi" -näytöllä (aivojen skannaus) tarvittavan kohdistuksen muutoksen määrittämiseksi. ja sitten todellinen kartiomainen skannaus vuonna 1941.
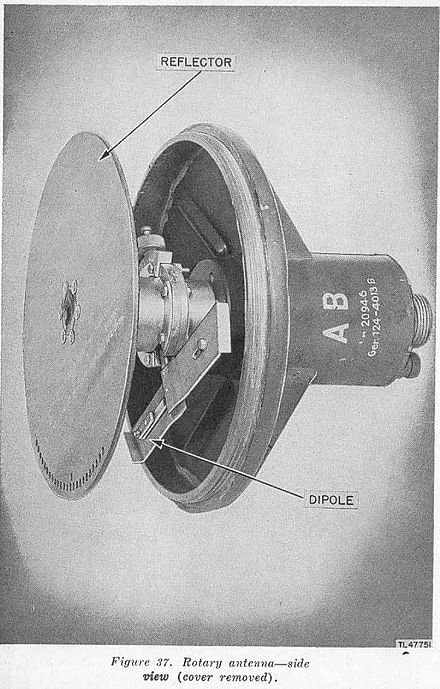
Wirzburg "Quirl" (vispilä) 25 Hz: n pyörivä peili.
He sanovat:
- Würzburg D otettiin käyttöön vuonna 1941, ja siihen lisättiin kartiomainen skannausjärjestelmä, jossa käytettiin siirtotaajuusvastaanotinta nimeltä Quirl (saksaksi vispilä), joka pyöri taajuudella 25 Hz. Tuloksena oleva signaali siirtyi hieman astian keskiviivasta, kiertäen akselin ympäri ja menen päällekkäin sen keskellä. Jos kohdelentokone olisi antennin akselin yhdelle puolelle, signaalin voimakkuus kasvaisi ja haalistui, kun säde pyyhkäisi sen yli, jolloin järjestelmä pystyi siirtämään astiaa maksimaalisen signaalin suuntaan ja seuraamaan siten kohdetta. Kulmaresoluutio voidaan tehdä pienemmäksi kuin antennin säteen leveys, mikä johtaa huomattavasti parempaan tarkkuuteen, luokkaa 0,2 astetta atsimuutissa ja 0,3 astetta korkeudessa. Aikaisemmat esimerkit päivitettiin yleensä D-malliksi kentällä.
Kun saksalaiset olivat tehneet kaiken kehitystyön, Britannian kommandot järjestivät 27.-28. helmikuuta 1942 kuuluisan "Bruneval-raidan" Operation Biting ja veivät pois täydellisen Wurzburg-järjestelmän, joka toimi ) lähellä Brunevalin rannikkoa.
Kartiokuvaa käytettiin myös pitkälle kehitetyssä Yhdysvaltain SCR-584 automaattisessa RADAR-seurannassa.
Kartiomainen skannausominaisuus ehdotettiin vuonna 1940 - kauan ennen Brunevalin raidaa.
584 käytti kartiomaista skannausjärjestelmää tarjoamaan täysin automaattisen kohteen seurannan sekä kohteen etsinnän ja tunnistamisen. Käyttöönotto oli tarkoitettu vuodelle 1942, mutta kehitysongelmat tarkoittivat, että se oli käytettävissä vasta vuonna 1944 - juuri ajoissa käytettäväksi V1 "Doodlebugeja" vastaan, jotka yhdessä sulautettujen RADAR-kuorien kanssa tekivät merkittävän eron Englannin V1-hyökkäysten tulokseen. / p>
-
Kartiopyyhkäisy otettiin käyttöön myös vuonna 1941 merivoimien 10 cm: n palohallintatutkalle, 3 ja sitä käytettiin saksalaisessa Würzburgin tutkassa vuonna 1941. SCR-584 kehitti järjestelmän paljon pidemmälle ja lisäsi automaattisen seurantatilan. [4] Kun kohde oli havaittu ja se oli kantaman sisällä, järjestelmä piti tutkan automaattisesti kohti kohdetta, jota ohjaavat antennin pohjaan asennetut moottorit. Havaitsemiseksi, toisin kuin seuranta, järjestelmä sisälsi myös kierteisen skannaustilan, jonka avulla se pystyi etsimään lentokonetta. Tässä tilassa oli oma erillinen PPI-näyttö helpottamaan tulkintaa. Tässä tilassa antennia pyöritettiin mekaanisesti nopeudella 4 kierrosta minuutissa, kun sitä työnnettiin ylös ja alas pystysuunnassa skannaamiseksi.
Järjestelmää voitaisiin käyttää neljällä taajuudella, jotka ovat välillä 2700–2 800 MHz (10–11 cm aallonpituudella), lähettämällä 300 kW: n 0,8 mikrosekunnin pituisia pulsseja, joiden pulssin toistotaajuus (PRF) on 1707 pulssia sekunnissa. Se pystyi havaitsemaan pommikoneen kokoiset kohteet noin 40 mailin etäisyydellä ja pystyi yleensä seuraamaan niitä automaattisesti noin 18 mailin etäisyydellä. Tämän alueen tarkkuus oli 25 jaardin etäisyydellä ja 0,06 astetta (1 mil) antennin laakerikulmassa (katso taulukko "SCR-584 tekniset ominaisuudet"). Koska sähköpalkin leveys oli 4 astetta (-3db tai puolitehotasoon), kohde tahriisi sylinterin osan yli, jotta se olisi laakerissaan leveämpi kuin kantama (ts. Luokkaa 4 astetta eikä 0,06 astetta, jonka mekaaninen osoitintarkkuus viittaa) kaukaisiin kohteisiin. Aluetiedot näytettiin kahdella "J-tähtäimellä", samanlainen kuin tavallisempi A-linjan näyttö, mutta järjestetty paluuviiveelle ajoitettuun säteittäiseen kuvioon. Yhtä laajuutta käytettiin karkealle alueelle, toista hienolle.
Ei liittynyt kartiomaiseen skannaukseen, mutta erittäin merkityksellinen sen optimaaliselle sovellukselle oli Ison-Britannian keksimän ontelomagnetronin käyttö, jonka Yhdysvallat käytti laajasti 584: ssä ja muissa RADAR-laitteissa.Tämä antoi mahdollisuuden käyttää paljon suurempia tehotasoja ja paljon suurempia taajuuksia.