Ajoituksen edistäminen on yleinen käytäntö sähkömoottoreille ja polttomoottoreille. Tarkoituksena on lisätä tehokkuutta. Toisin sanoen maksimoida virrankulutus tietylle teholle.
Sähkömoottoreissa tuotetun momentin määrä suhteessa roottorikenttävektoriin staattorikenttävektorin suhteen saadaan seuraavasti:
\ $ \ tau = \ tau_ {max} ~ sin ~ \ theta \ $
Missä:
\ $ \ theta = ~ \ $ kulma kahden kenttävektorin välillä
Kun \ $ \ theta = 0 °, ~ \ tau = 0 \ $ (vääntömomentti ei tarkoita liikkumista) ja kun \ $ \ theta = 90 °, ~ \ tau = \ tau_ {max} \ $ . Kaikissa muissa kulmissa 0 ° - 90 ° \ $ \ tau \ $ on prosenttiosuus \ $ \ tau_ { max} \ $ .
Tässä ongelmana on, että roottorin pyöriessä vuorovaikutus sen magneettikentän ja staattorin välillä saa kentät vääristymään ja siirtymään normaalista ei-pyörivästä asennostaan. Mitä nopeammin se pyörii, sitä enemmän kentät vääristyvät. Paras kuva, jonka voisin löytää tästä ilmiöstä, tulee itse asiassa Wikipedian artikkelista harjattuja tasavirtamoottoreita. Periaate on sama harjattomalle:
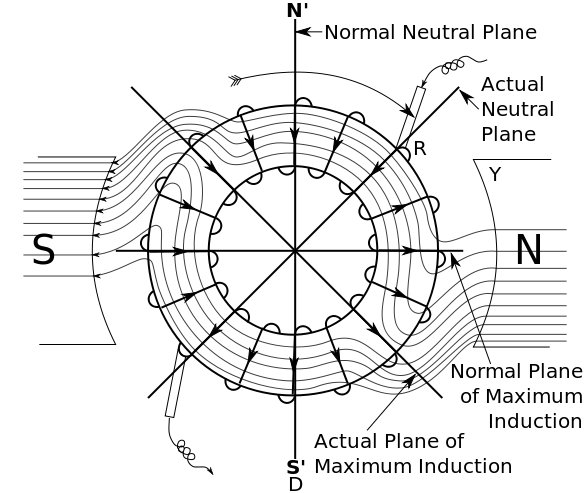
Edistämällä ajoitusta varmistat, että kommutaatio tapahtuu, kun molemmat kentät ovat 90 °: n etäisyydellä toisistaan järjestyksessä maksimoida vääntömomentti suurimmalla nopeudella. Koska kenttien sijainti muuttuu kuitenkin nopeuden myötä, tämä ajoitus etenee vain yhdelle tietylle nopeudelle yhdessä tietyssä suunnassa. Kaikilla muilla nopeuksilla hyötysuhde on alle optimaalisen, kun kahden kentän välinen kulma laskee 90 °: sta. Ja päinvastaisessa suunnassa, olet paljon vähemmän kuin optimaalinen, tarvitset paljon enemmän virtaa saman vääntömomentin tuottamiseksi.
Vaatimuksistasi riippuen 0 asteen ajoitus ei välttämättä ole niin huono asia. Jos sinun on pystyttävä kääntämään suunta, mutta et välitä niin paljon virrankulutuksesta, enimmäisnopeudesta tai suurimmasta vääntömomentista, 0 °: n ajoitus voi olla hyvä kompromissi. Kuitenkin, jos sinun on tuotettava suurin vääntömomentti suurimmalla nopeudella vetämättä liikaa virtaa. Tällöin edistynyt ajoitus on välttämätöntä.
Huomautus siitä, mikä aiheuttaa vääristymiä
Vääristymä johtuu ystäviemme Lenz ja Faraday . Yksinkertaisessa moottorissa kela pyörii magneettikentässä:
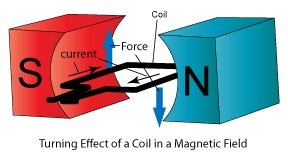
Kun virta kulkee kelan läpi, se aiheuttaa muodostuneen magneettikentän langan ympärille. Kun muodostunut magneettikenttä on vuorovaikutuksessa staattisen magneettikentän kanssa, niiden voimat työntävät toisiaan ja kentät vääristyvät:
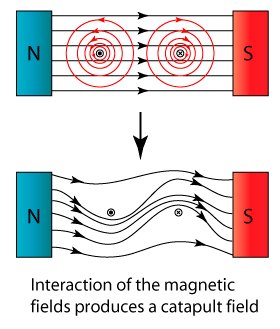
Käämin pyöriessä se liikkuu sisään ja ulos magneettikentän. Kun lanka on magneettikentässä, kenttä vääristyy. Kun johto on poissa, kenttä napsahtaa takaisin normaaliksi. Tämä takaisin napsauttaminen vie jonkin aikaa. Kun kela pyörii yhä nopeammin, kentällä on vähemmän aikaa napsahtaa takaisin normaaliksi. Joten mitä nopeammin moottori pyörii, sitä vääristyneempi kenttä pysyy.
Hieman samankaltainen
Huomaan joskus, että ihmisillä on helpompaa ymmärtää polttomoottoreita kuin sähkömoottorit. Ehkä se johtuu siitä, että ihmisillä on parempi käsitys räjähdyksistä verrattuna pyöriviin magneettikenttiin. Tai ehkä siksi, että bensiiniautot ovat edelleen niin paljon yleisempiä. Jos olet yksi niistä ihmisistä, tutustu tähän artikkeliin Miten Stuff Works. Siinä selitetään syyt ajoituksen edistämiselle polttomoottorissa. Näiden kahden välillä on paljon yhtäläisyyksiä, ja analogia voi olla hyödyllistä ymmärryksellesi.