One way to do this is to briefly stop driving the motor, long enough to let any residual current from the driving voltage die down, and then simply measure the voltage. The time it takes the current to settle will depend on the inductance of the windings. This is simple to understand, and the undriven interval can be made quite short, but this has obvious disadvantages.
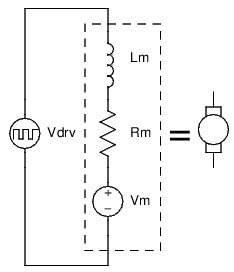
Another method involves a clever use of Ohm's law. A motor can be modeled as a series circuit of an inductor, a resistor, and a voltage source. The inductor represents the inductance of the motor's windings. The resistor is the resistance of that wire. The voltage source represents the back-EMF, and it is directly proportional to the speed of the motor.
If we can know the resistance of the motor, and we can measure the current in the motor, we can infer what the back-EMF must be while the motor is being driven! Here's how:
We can ignore \$L_m\$ so long as the current through the motor is not changing much, because the voltage across an inductor proportional to the rate of change of current. No change in current means no voltage across the inductor.
If we are driving the motor with PWM, then the inductor serves to keep the current in the motor relatively constant. All we care about then, is really the average voltage of \$V_{drv}\$, which is just the supply voltage multiplied by the duty cycle.
So, we have an effective voltage we are applying to the motor, which we are modeling as a resistor and a voltage source in series. We also know the current in the motor, and the current in the resistor of our model must be the same because it is a series circuit. We can use Ohm's law to calculate what the voltage across this resistor must be, and the difference between the voltage drop over the resistor and our applied voltage must be the back-EMF.
Example:
motor winding resistance \$ = R_m = 1.5\:\Omega\$
measured motor current \$= I = 2\:\mathrm A \$
supply voltage \$= V_{cc} = 24\:\mathrm V \$
duty cycle \$ = d = 80\% \$
Calculation:
24V at an 80% duty cycle is effectively applying 19.2V to the motor:
$$ \overline{V_{drv}} = dV_{cc} = 80\% \cdot 24\:\mathrm V = 19.2\:\mathrm V $$
The voltage drop over the winding resistance is found by Ohm's law, the product of the current and winding resistance:
$$ V_{R_m} = IR_m = 2\:\mathrm A \cdot 1.5\:\Omega = 3\:\mathrm V $$
The back-EMF is the effective driving voltage, less voltage across the winding resistance:
$$ V_m = \overline{V_{drv}} - V_{R_m} = 19.2\:\mathrm V - 3\:\mathrm V = 16.2\:\mathrm V $$
Putting it all together into one equation:
$$ V_m = dV_{cc} - R_m I $$